Вінтажна техніка: перші роботи 20 століття (24 фото)
20 століття відкрило епоху технологічного прогресу і, в тому числі, прогресу в галузі робототехніки. Експерименти початку століття, навіть самі дивні, заклали основу для розробки у 50-ті роки перших промислових роботів та подальшої автоматизації виробництва. Сучасні андроїди так чи інакше є нащадками цих давніх і неповоротких залізяків! 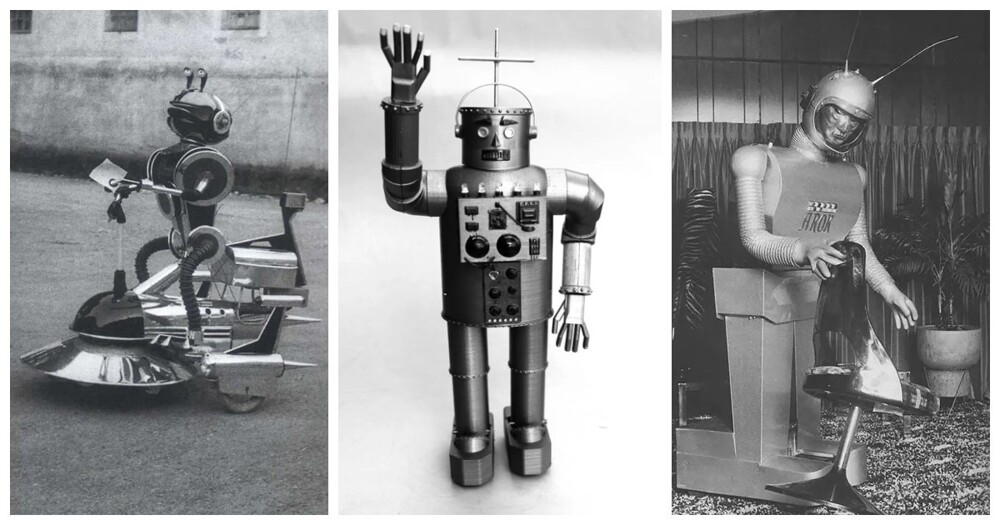
Сталевий робот-гуманоїд Ясутаро Міцуї (1932 р.) Токіо, Японія 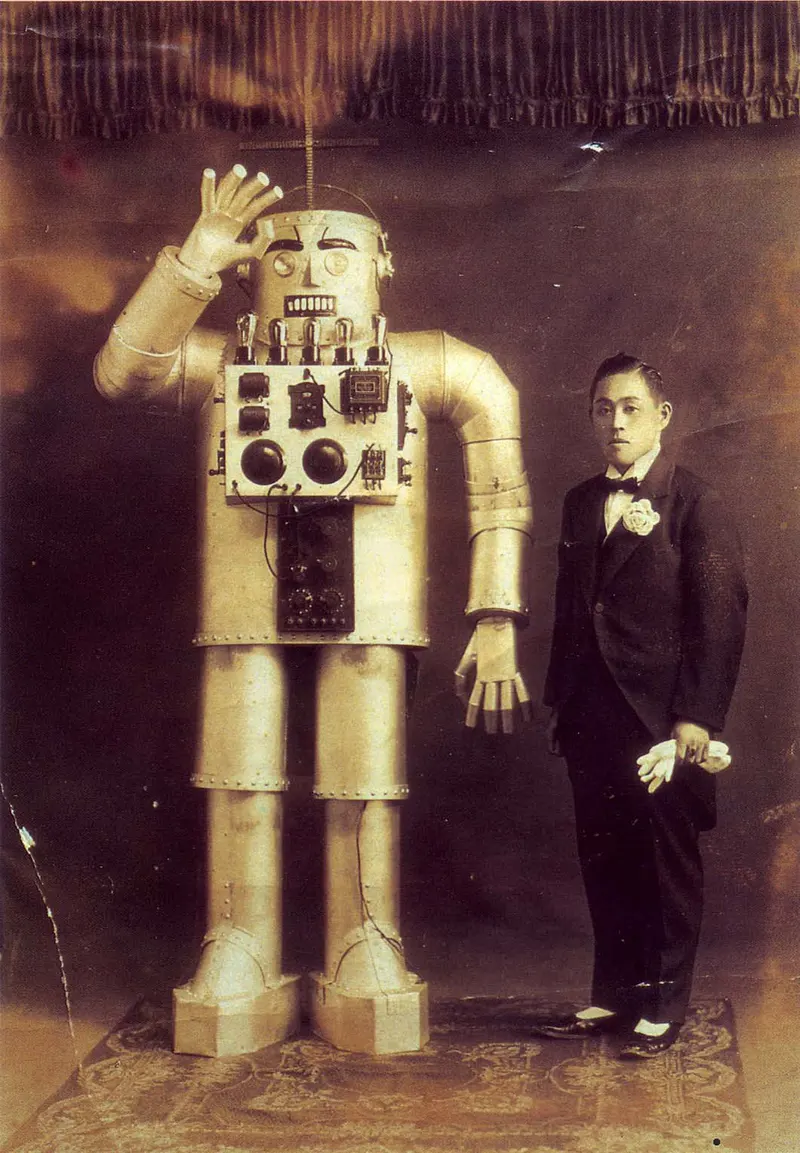
Робот-гуманоїд Ясутаро Міцуї - один із перших японських. людиноподібних роботів. Фотографії взяті з книги Харукі Іноуе 1993 року під назвою "Nihon Robotto Soseiki 1920-1938". Видимі електричні частини та клапани робота, схоже, більше створені для зовнішнього антуражу та не несуть функціоналу. Подібний дизайн, в якому розкривається внутрішня робота, що стала надалі стандартною особливістю японських роботів та іграшок. 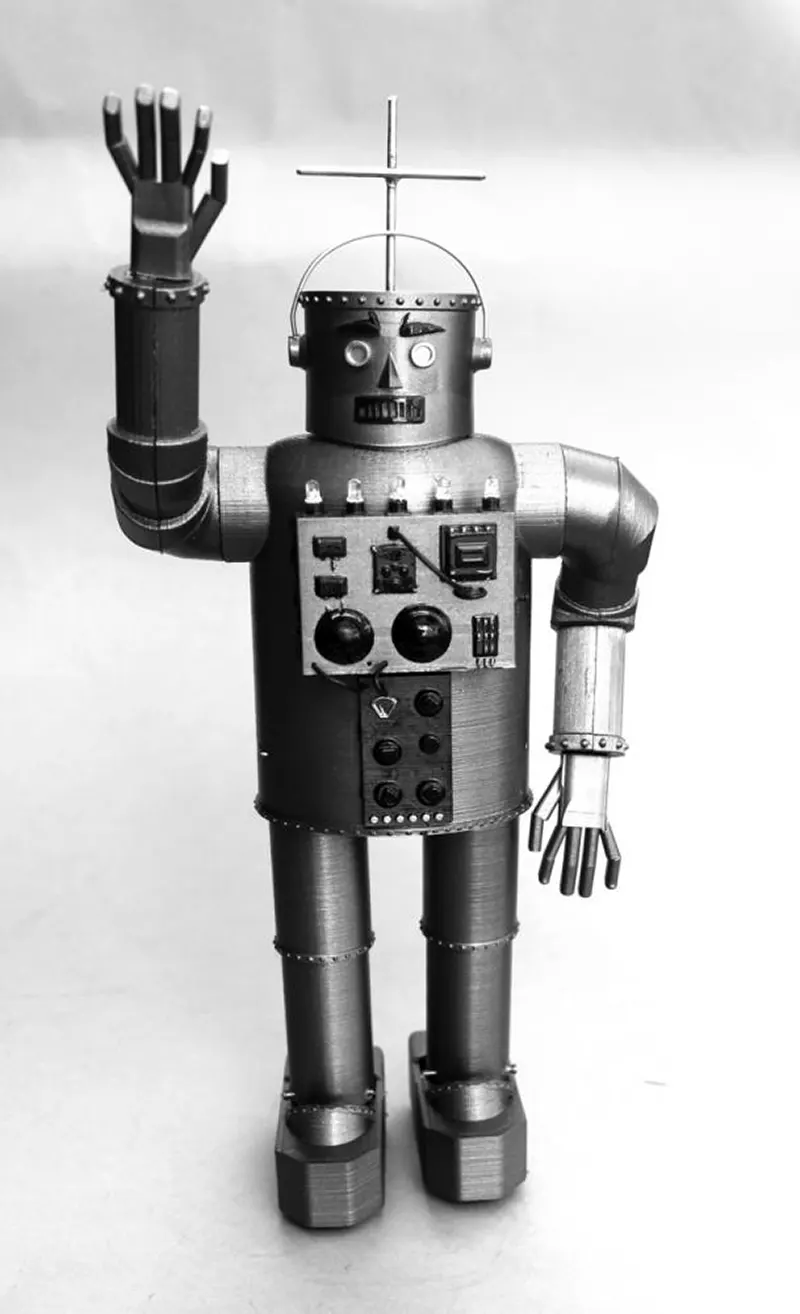
Коли ми уважно розглядаємо робота Міцуї, то бачимо, що він майже не може рухатись. На його ногах немає коліс, а форма ніг припускає, що не може ходити. На верхній частині ніг є мітки, що натякають на можливий уклін, що має важливий сенс для японської культури.
Пальці та шия не згинаються, а руки можуть рухатися тільки вгору в плечі і обертатися в лікті. Ми також бачимо шнур живлення, що йде вгору по лівій нозі.
Робот Ель-Чіспас, Іспанія (1953 р.) 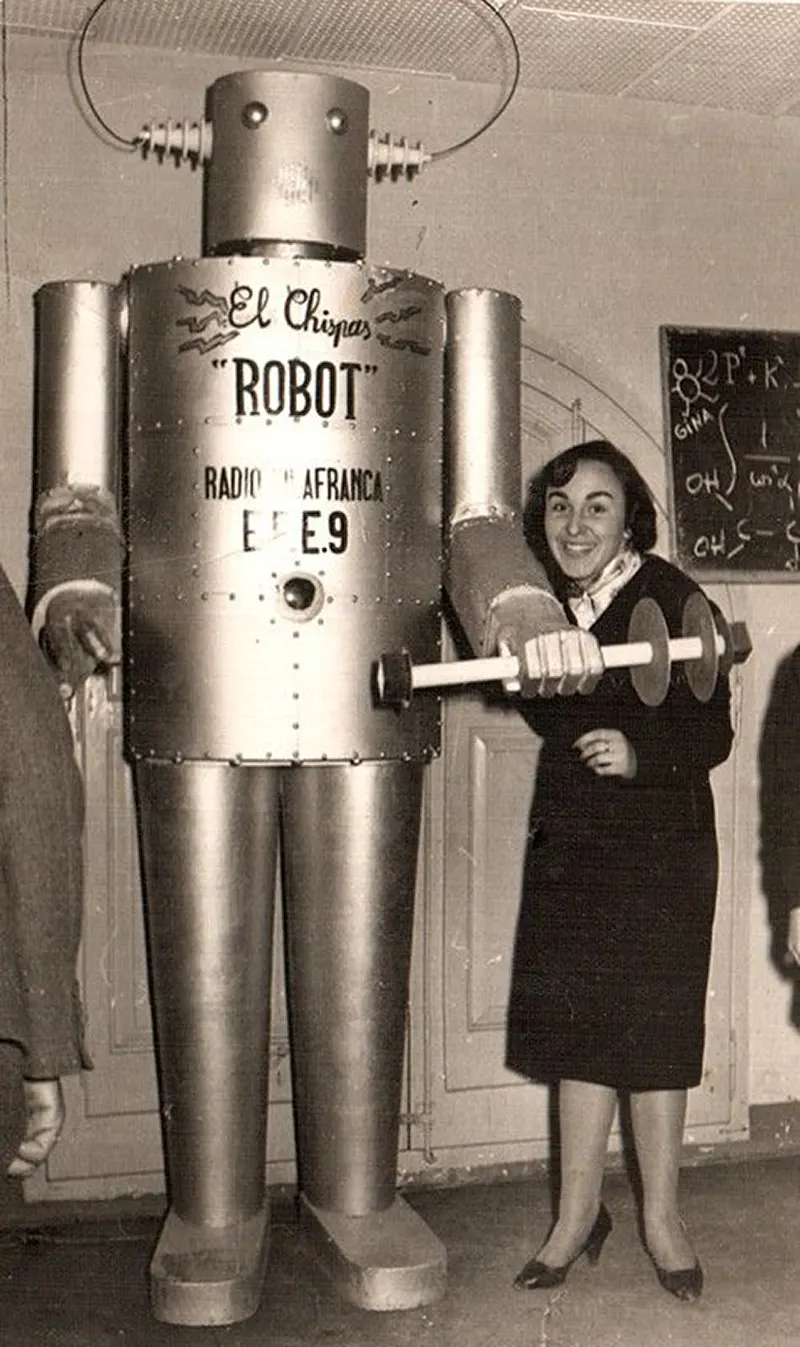
Розповідає Антоніо Гуаль із Барселони: «У 1950-ті роки мій батько, Антоні Гуаль Сегура, та його колеги на місцевій радіостанції Radio Vilafranca зробили спільні зусилля з проектування та створення чудового творіння, відомого як «Ель Чіспас» (перекладається як "Іскри"). Цей геніальний витвір міг похвалитися здатністю рухати руками і говорити, а десь у районі пупка в нього було віконце, через яке можна було помилуватися чарівними іскрами. Подання «Ель Чіспаса» під час святкової Фієсти Майора у 1953 році викликало справжню сенсацію, залишивши незабутнє враження на присутніх».
Робот-супермен Денніс (1939 р.) 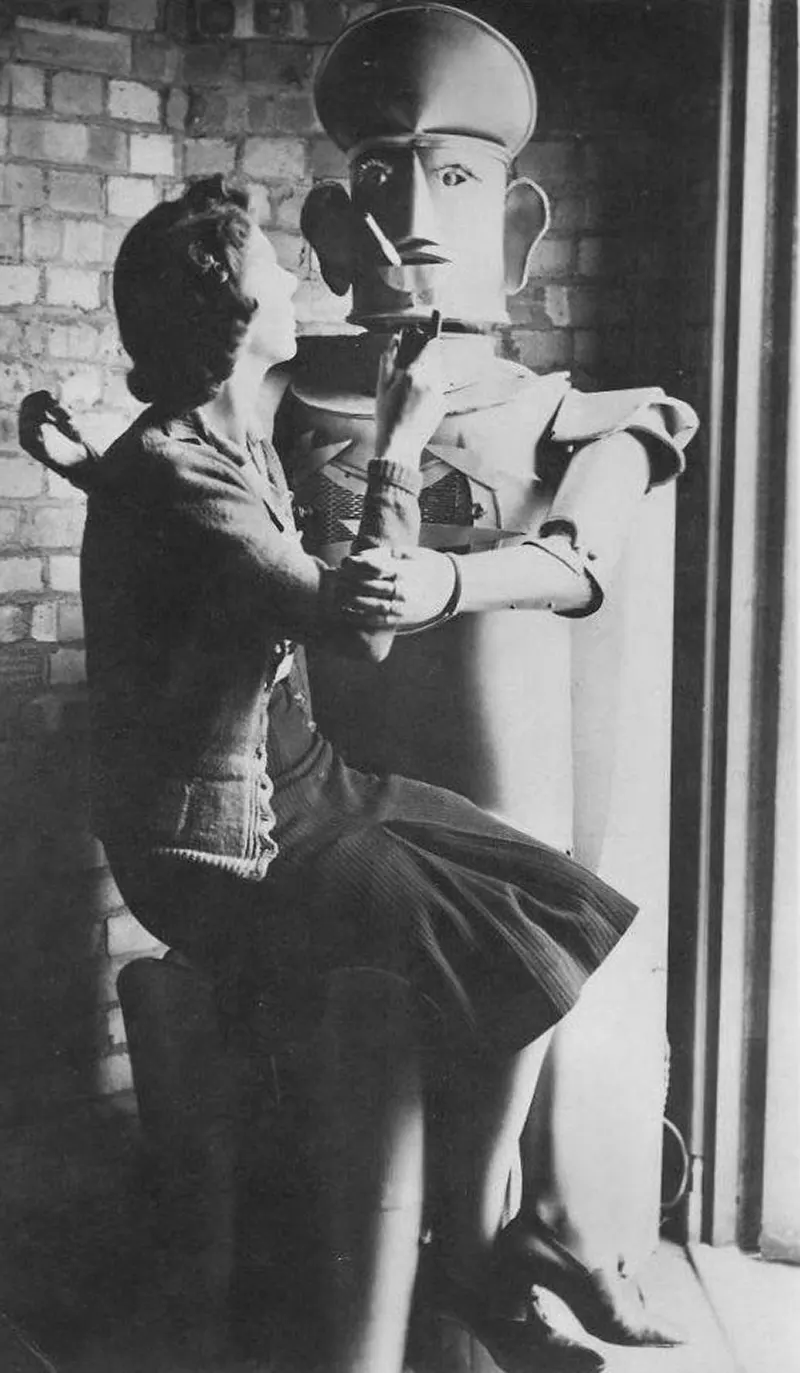
1939 року британський винахідник Чарльз Лоусон створив «Супермена Денніса», робота заввишки 2 метри. Стверджувалося, що цей робот може робити безліч різних речей, наприклад, контролювати рух транспорту, співати, прикурювати та курити сигарету, а також сидіти чи стояти. Просто, але зі смаком! Робот Денніс підкреслив творчий дух свого часу, показавши, як машини можуть імітувати дії людини та сприяти вирішенню різних завдань.
Мобот (1961 р.) 
Надворі 1961 рік, і компанія Hughes Aircraft Electronic Labs вирішила зробити революцію у світі за допомогою чудового робота-помічника Mobot.
Мобот був трохи більшим, ніж кілька холодильників разом узятих, і це механічне диво мало автоматизувати кожне критично важливе завдання у вашому житті. Він мав допомогти, наприклад, нафарбувати нігті, застебнути блискавку на сукню або причесатися. 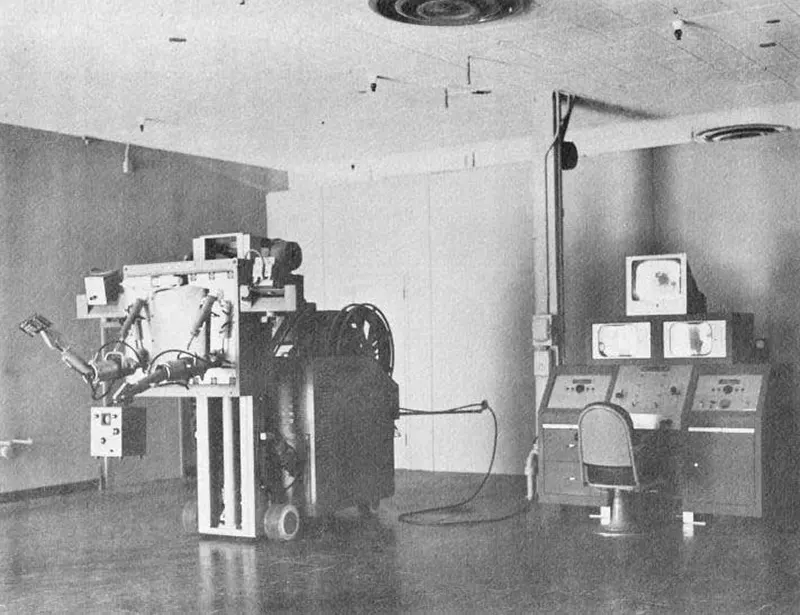
Метою проекту була розробка мобільного робота, який міг б переміщатися та виконувати завдання автономно. Мобот був створений, щоб продемонструвати потенціал робототехніки в різних додатках, таких як спостереження, дослідження і, можливо, навіть виконання завдань у небезпечних середовищах.
Проект, ймовірно, включав використання датчиків, обчислювальних систем та алгоритмів, що дозволяють роботу відчувати довкілля, приймати рішення та переміщатися без прямого контролю людини.
Робот-випробувач космічного скафандра НАСА (1965 р.) 
Перед тим як відправити людей на Місяць, НАСА хотіло протестувати прототипи скафандрів астронавтів на людиноподібному роботі. І такий андроїд із гідравлічним приводом був створений... і навіть міг бути нормально функціонувати, якби не його схильність до витоку олії при використанні. Так званий проект «Зчленований манекен з електроприводом» тривав з 22 травня 1963 року по 31 липня 1965 року.
<src="https://cn22.nevsedoma.com.ua/p/26/2688/129_files/f25a50fea16d518c7abbcd2fbeb8ae58.webp">
Це розробка Дослідницького інституту IIT у Чикаго. Робот міг моделювати 35 основних рухів людини та був оснащений датчиками на кожному суглобі для вимірювання сил, що впливають на людське тіло із боку герметичного скафандра. Рухи робота-манекена забезпечувалися гідравлічними приводами, що наводилися в дію олією, яка текла через «систему кровообігу» нейлонових трубок.
Конструкція дозволяла андроїду повертати стегна, піднімати. і опускати руки та ноги, знизувати плечима, стискати кулаки і навіть потискати руки, але він не міг витримувати тиск, необхідний для переміщення кінцівок робота без витоків.
Сепулька, робот-екскурсовод, Радянський Союз (1962 р.) 
Цей роботизований гід був розроблений у 1962 році у експериментальної майстерні Всесоюзного товариства «Знання» конструктором М. Олександровим та художнім керівником М. Гороховим, а потім відремонтовано у 1987 році. Використовувався у Політехнічному музеї.
Мова Сепульки відтворюється вбудованим магнітофоном. Програвання стрічки рухів робота здійснюється дистанційно радіокерування з відстані до 20 метрів.
Сепульку назвали на честь робота з оповідань Станіслава Лема. Персонаж Станіслава Лема Сепулька був об'єктом невідомого походження та призначення.
Фредді Форд, механічний робот, який відповідає на запитання (1960-ті рр.) 
Зроблений майже повністю з автомобільних деталей, Фредді мав зріст 2,8 метра та важив понад 360 кг. Замість ніг у нього були масляні піддони, замість рук - гальмівні колодки. Його вуха були зроблені з кришок радіаторів із прикріпленими до них автомобільними антенами. Його очі були габаритними вогнями "Форда Мустанга", а рот - ліхтарем. заднього ходу "Форда Тандерберд". Його руки були вихлопними трубами, а ноги – амортизаторами.
З 1967 року Фредді допомагав компанії "Форд" продавати автомобілі на автомобільних виставках. Він був не дуже активний, але міг відповісти на десяток запитань із зали від відвідувачів. Не дивно, що більшість його відповідей містили банальні жарти та захоплено відгукувалися про продукцію Ford.
Робот Космос, Франція (1958 р.) 
«Посунься, людина». Навіть найдосвідченішому паризькому водієві буде складно встояти перед вказівками водія цього своєрідний автомобіль.
Але жодного позаземного впливу тут немає; це робот, народжений і виріс прямо тут, на Землі. Зустрічайте "Космос", доморощене творіння, яке стояло поряд з вертольотом на науковій виставці на березі Сени. Незважаючи на безтурботну репутацію французів, "Космосу" вдалося привернути до себе значну увагу.
Робо-Сенсор, Японія (1982 р.) 
Розповідь про це чудо техніки у журналі Weekly Reader, випуск 23, 2 квітня 1982 р. «Японський робот тисне людині руку, тоді як спеціальні датчики у роботі вимірюють хватку та температуру тіла. Відображаються цифри, і робот може коментувати щось на кшталт: «ВАУ, яка хватка! Робот також може вимірювати кімнатну температуру та витоку газу».
Робот Горо, Японія (1964 р.) 
На фотографії ми бачимо Горо, робота заввишки півтора метри, розробленого дослідницькою фірмою з виробництва іграшок. Він оточений школярами у столиці Японії Токіо, 29 лютого 1964 року. Горо вміє ходити у всіх напрямках, кланяється людям, яких зустрічає, підморгує дівчатам і розмовляє радіо в руці свого творця.
Cygan (він же Gygan), Італія (1957) 
Cygan, гігантський радіокерований робот, який більше півстоліття тому зачарував світ, сяючи очима, схожими на автомобільні фари, різко повертаючи голову зліва направо і рухаючись вперед з жахливою швидкістю, був проданий на аукціоні після того, як десятиліттями зберігався у приватній колекції.
Машина висотою 2,5 метра та вагою 450 кг була показана на торговому ярмарку в Мілані в 1957 році, тоді ж, коли в космос запустили перший штучний супутник Землі "Супутник-1". 
Дизайнер П'єро Фіоріто, інженер із Туріна, впевнено стверджував, що його роботвиглядає як «гордий англієць».
Робот Барбаросса (1909 р.) 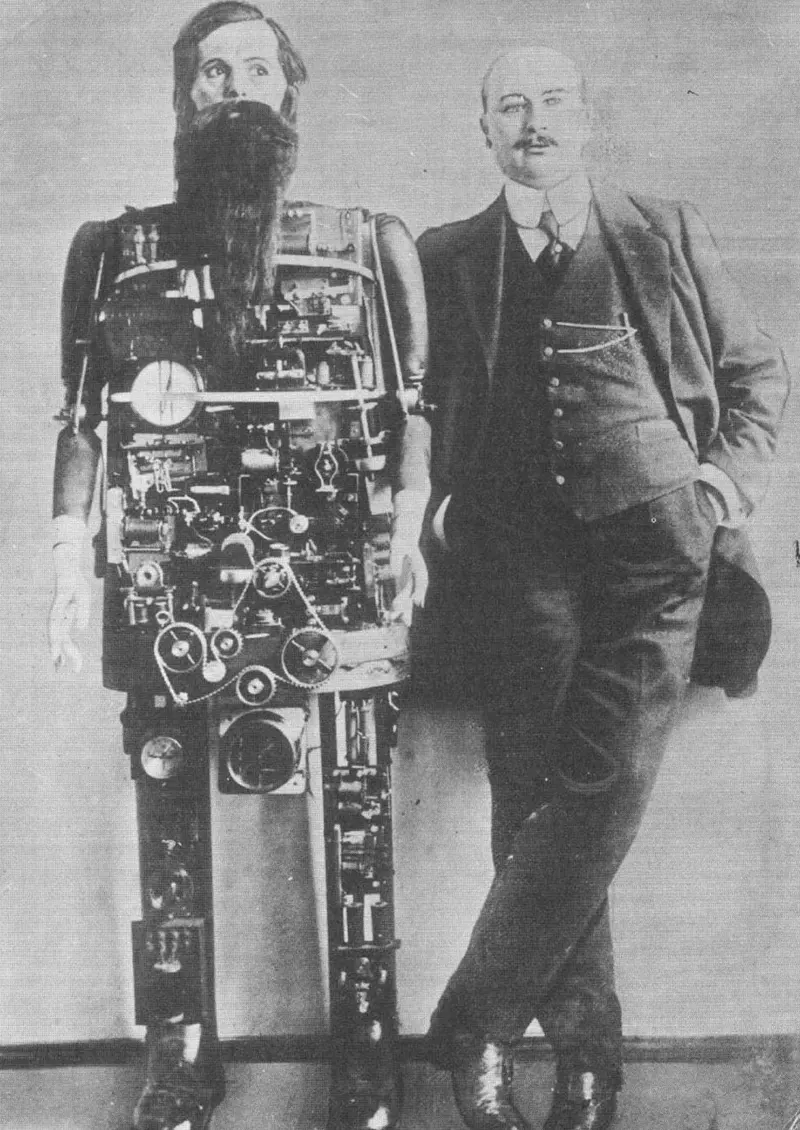
Відомо про цю історію дуже мало. Є лише дивна фотографія та стаття, в якій розповідається про роботу на ім'я Окультус або Барбаросса, виставленому в Берліні в 1909 герром Адольфом Вітменом, відомим німецьким винахідником.
«Вітмену після довгих років роботи вдалося створити механічної людини, яка може ходити, говорити, співати, свистіти і сміятися. Цей механічний шедевр настільки людяний, що на відстані метра його неможливо відрізнити від живої істоти. Фігура являє собою масу хитромудрих шестерень і механізмів. У скрині розташовано кілька фонографів, але як керується механізм, залишається таємницею винахідника. Говорять, що в основі механічного дива лежать бездротових електричних хвиль. Кожна частина фігури керується невеликим електродвигуном».
Робот Unimate (1961 р.) 
Робот Unimate подає каву, 1967 рік
Unimate був першим промисловим роботом, який працював на складальної лінії General Motors на заводі Inland Fisher Guide Юінг-Тауншип, штат Нью-Джерсі, 1961 року.
Він був винайдений Джорджем Деволом у 1950-х роках на основі його оригінального патенту, поданого у 1954 році та виданого у 1961 року. Машина виконувала роботу з транспортування відлитих під тиском деталей зі складальної лінії та зварювання цих деталей на кузовах автомобілів. Це було небезпечним завданням для робітників — вони могли отруїтися отруйними. парами або травмуватися через необережність.
Ерік, британський робот (1928 р.) 
Ерік Робот та його винахідник капітан У.Х. Річардс.
Навіть британські роботи влаштовують післяобіднє чаювання. Ерік, перший коли-небудь існував британський робот, здавалося, вірив, що йому є чому подавати приклад. Він умів повертати голову та кланятися. Його винахідника звали У.Х. Річардс.
Робот Арок (1970-ті) 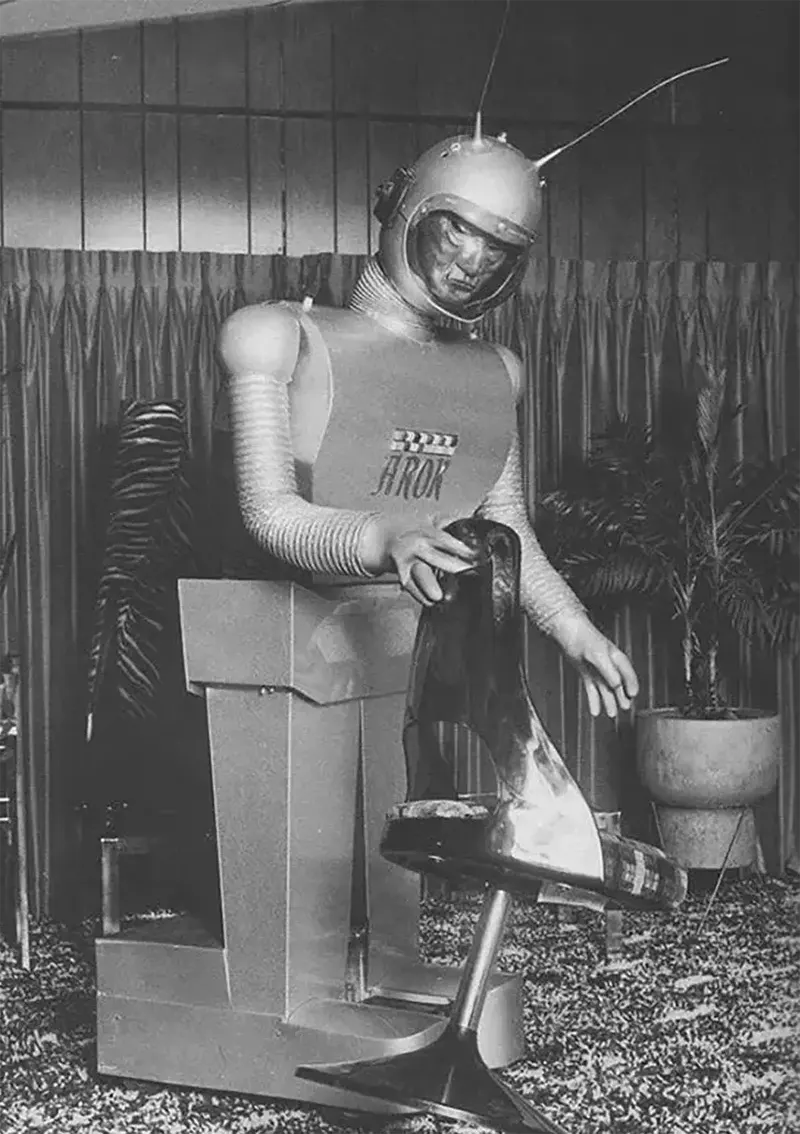
Розробка Бена Скори з Палос-Хіллз. Робот АРОК (прізвище Скори, написане задом наперед, без літери S), у робочому стані міг виконувати різні завдання, такі як прибирання пилососом, змішування напоїв, розмови, фотографування, підйом ваг до 70 кг та вигулювання собаки. Він також міг згинатися у талії під кутом 45 градусів і повертати верхню частину тулуба вправо та вліво. Він також міг «їхати» зі швидкістю 5 км на годину. 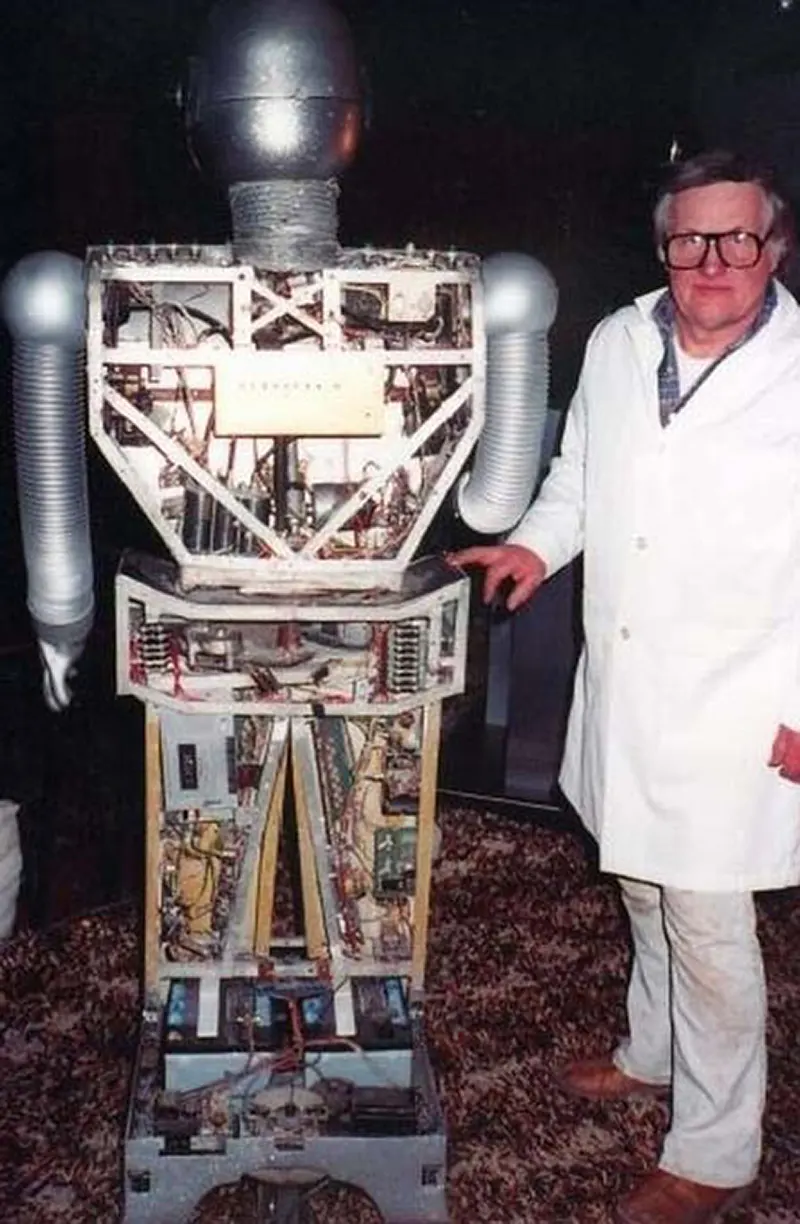
Бен Скора з 1969 по 1975 рік створював AROK, використовуючи Звичайні, повсякденні деталі. Всередині алюмінієвого корпусу робот має дві автомобільні батареї напругою 12 В, 15 електронних двигунів, 35 реле та сотні напівпровідникових інтегральних схем.
Замість черепа у нього мотоциклетний шолом, замість рук. витяжний шланг від сушарки для білизни, а замість рук гумові рукавички. У його панелі управління є мікрофон, а голові — динамік. 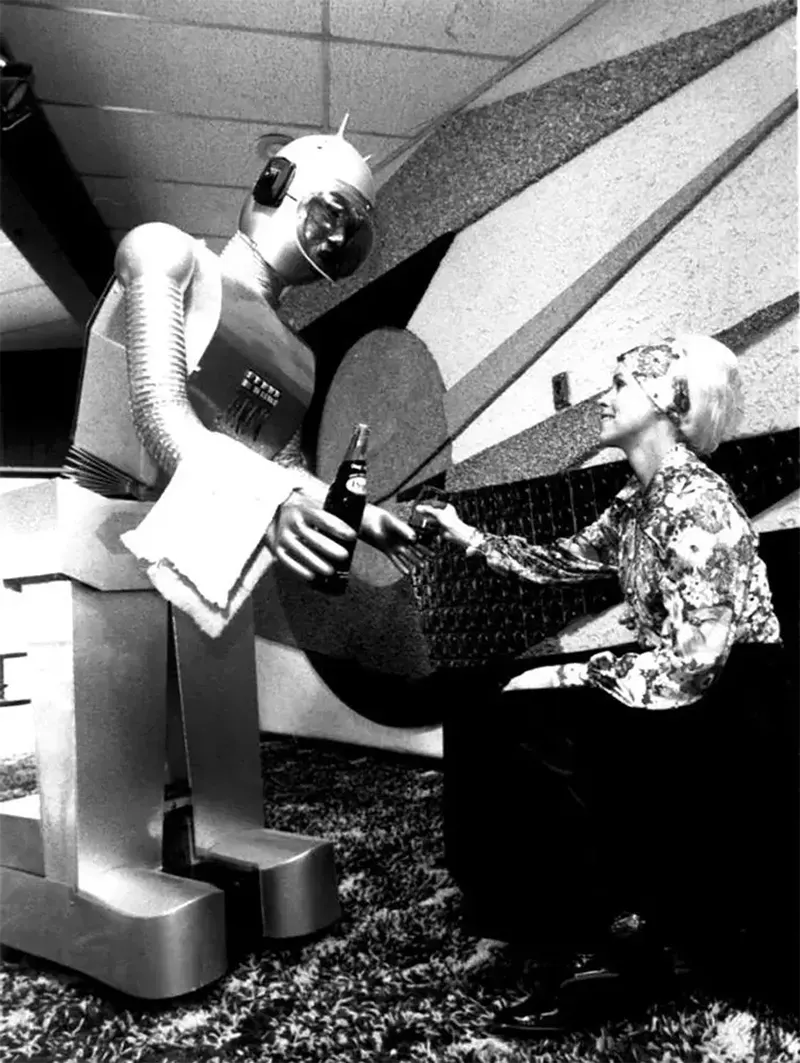
Керувати ним можна за допомогою пульта від телевізора, використовуючи сигнали FM-радіо. Один із двох 12-вольтових автомобільних акумуляторів забезпечує живлення AROK, а інший привід двигунів.
Акумулятори розміщені на платформах у ногах, а приводний механізм – в основі.
Робот Леонардо (1492 р.) 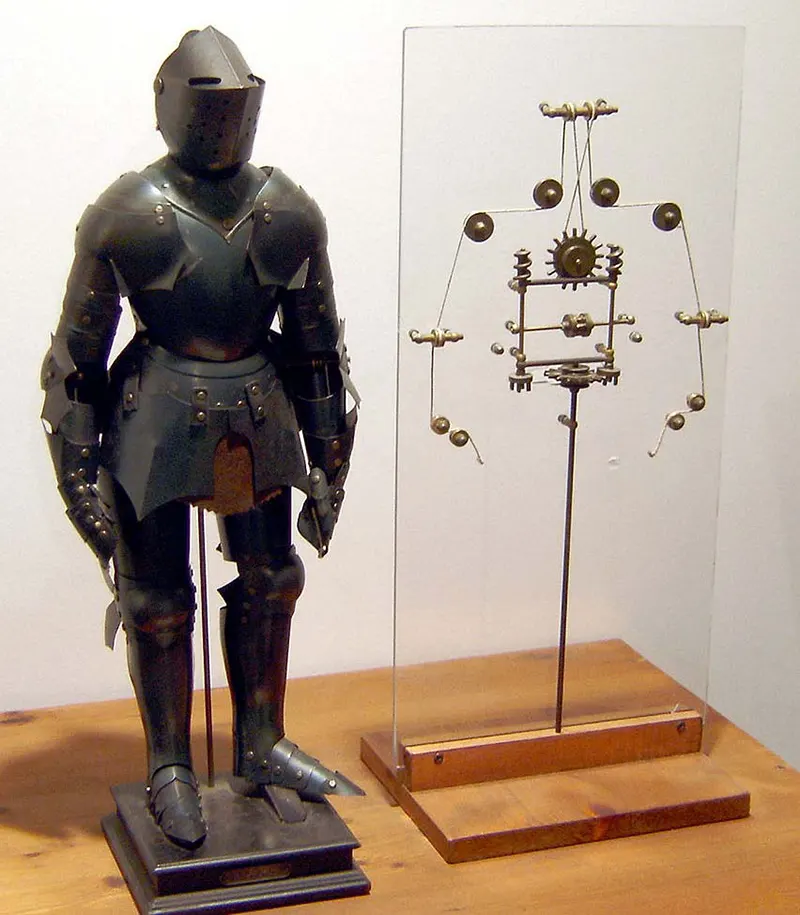
Модель робота Леонардо із внутрішнім пристроєм. Ймовірно, придуманий Леонардо да Вінчі приблизно 1495 року.
Нотатки про проект робота знайдені в альбомах Леонардо так Вінчі для малювання, які були заново відкриті у 1950-х роках. Говорять, що Леонардо продемонстрував машину на святі, влаштованому Людовіко Сфорца при міланському дворі 1495 року.
Робот-лицар міг стояти, сидіти, піднімати забрало і самостійно маневрувати руками, а також мав анатомічно правильну щелепу. Вся роботизована система керувалася поруч шківів та тросів. Після виявлення ескізів робот був побудований точно за проекту Леонардо і виявився повністю функціональним.
Робот Марія з фільму "Метрополіс" (1927 р.) 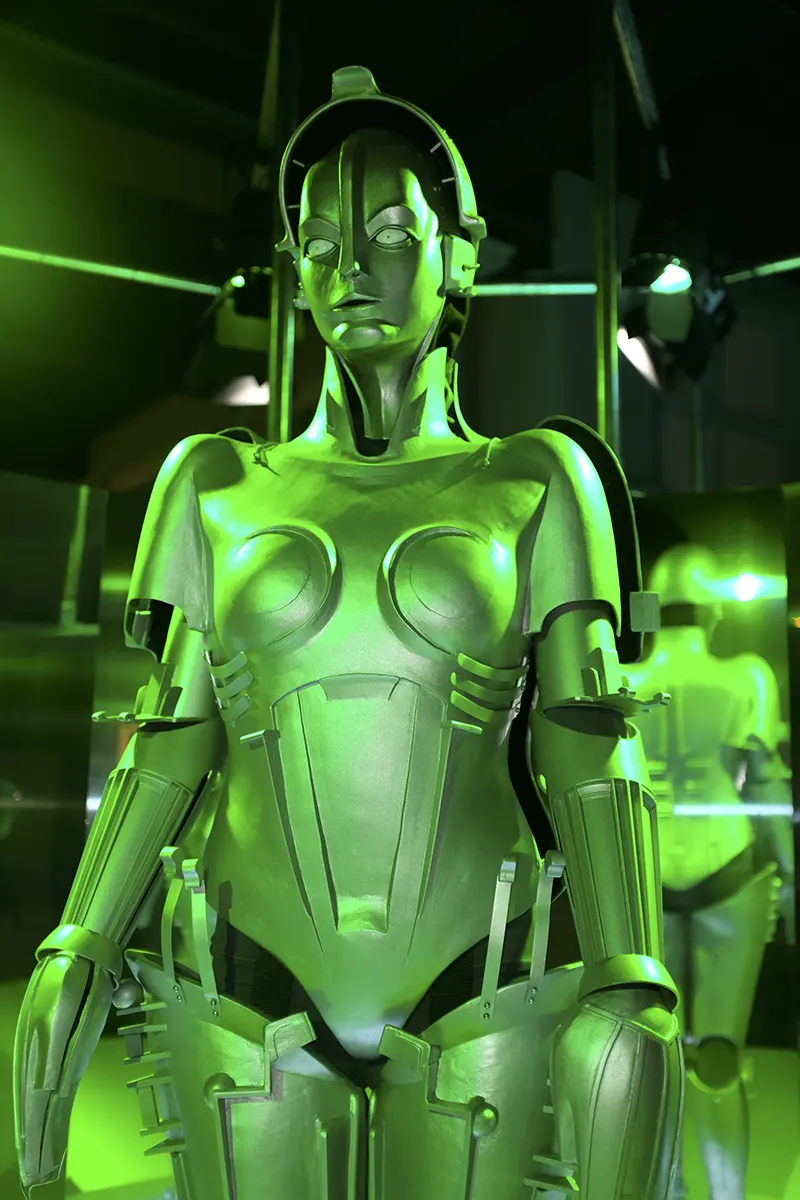
«Метрополіс», німий науково-фантастичний фільм, випущений у 1927 року режисером Фріцем Лангом, познайомив глядачів зі знаковим персонажем, людиноподібним роботом на ім'я Марія.
Зовнішність Марії у «Метрополісі» справді випередила своє час. Вона була технологічним дивом, що поєднує творчий дизайн з ранніми методами створення спецефектів. Роль Марії у фільмі полягала в тому, щоб служити інструментом маніпуляції та контролю. Її використовували для маніпулювання робітниками міського метрополітену та підтримки статус кво.