Винтажная техника: первые роботы 20 века (24 фото)
20 век открыл эпоху технологического прогресса и, в том числе, прогресса в области робототехники. Эксперименты начала века, даже самые странные, заложили основу для разработки в 50-е годы первых промышленных роботов и дальнейшей автоматизации производства. Современные андроиды так или иначе являются потомками этих древних и неповоротливых железяк! 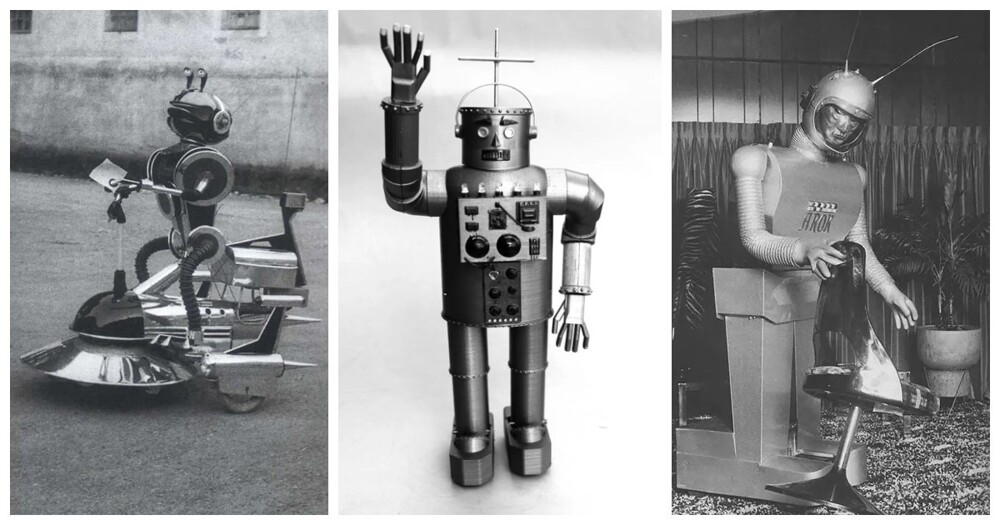
Стальной робот-гуманоид Ясутаро Мицуи (1932 г.) Токио, Япония 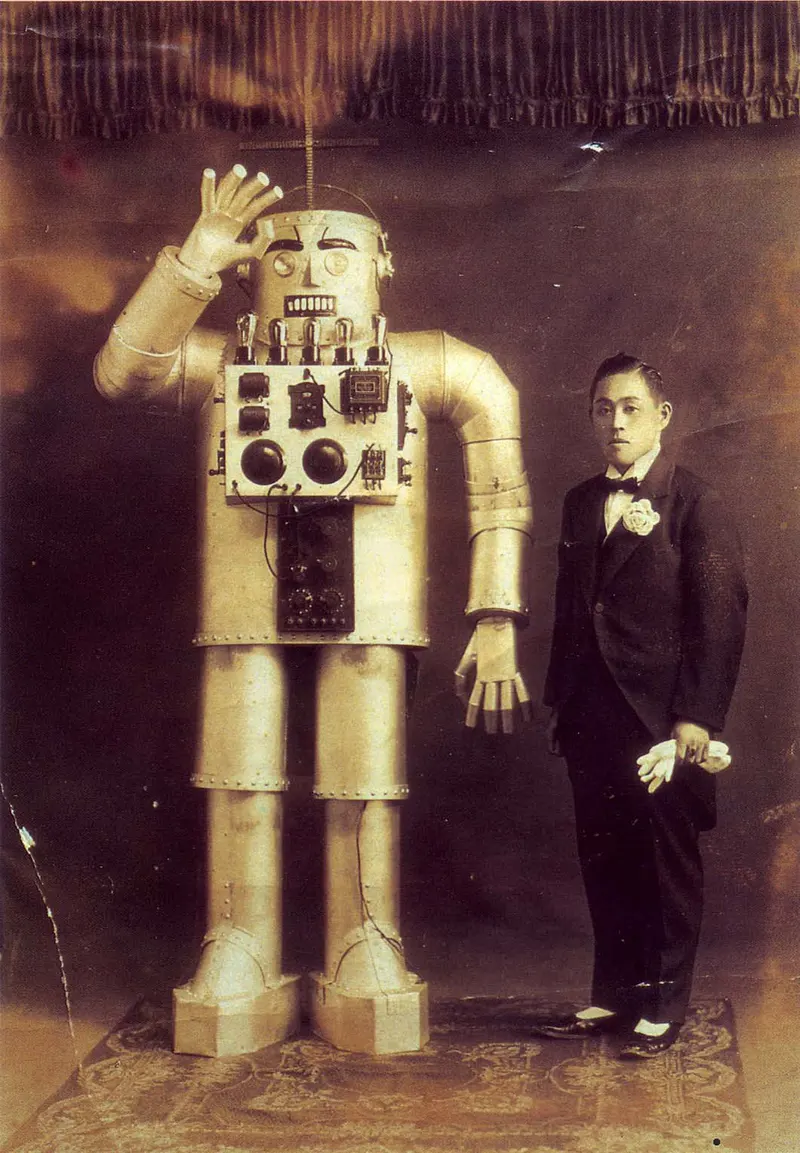
Робот-гуманоид Ясутаро Мицуи — один из первых японских человекоподобных роботов. Фотографии взяты из книги Харуки Иноуэ 1993 года под названием «Nihon Robotto Soseiki 1920-1938». Видимые электрические части и клапаны робота, похоже, больше созданы для внешнего антуража и не несут функционала. Подобный дизайн, в котором раскрывается внутренняя работа, стал в дальнейшем стандартной особенностью японских роботов и игрушек. 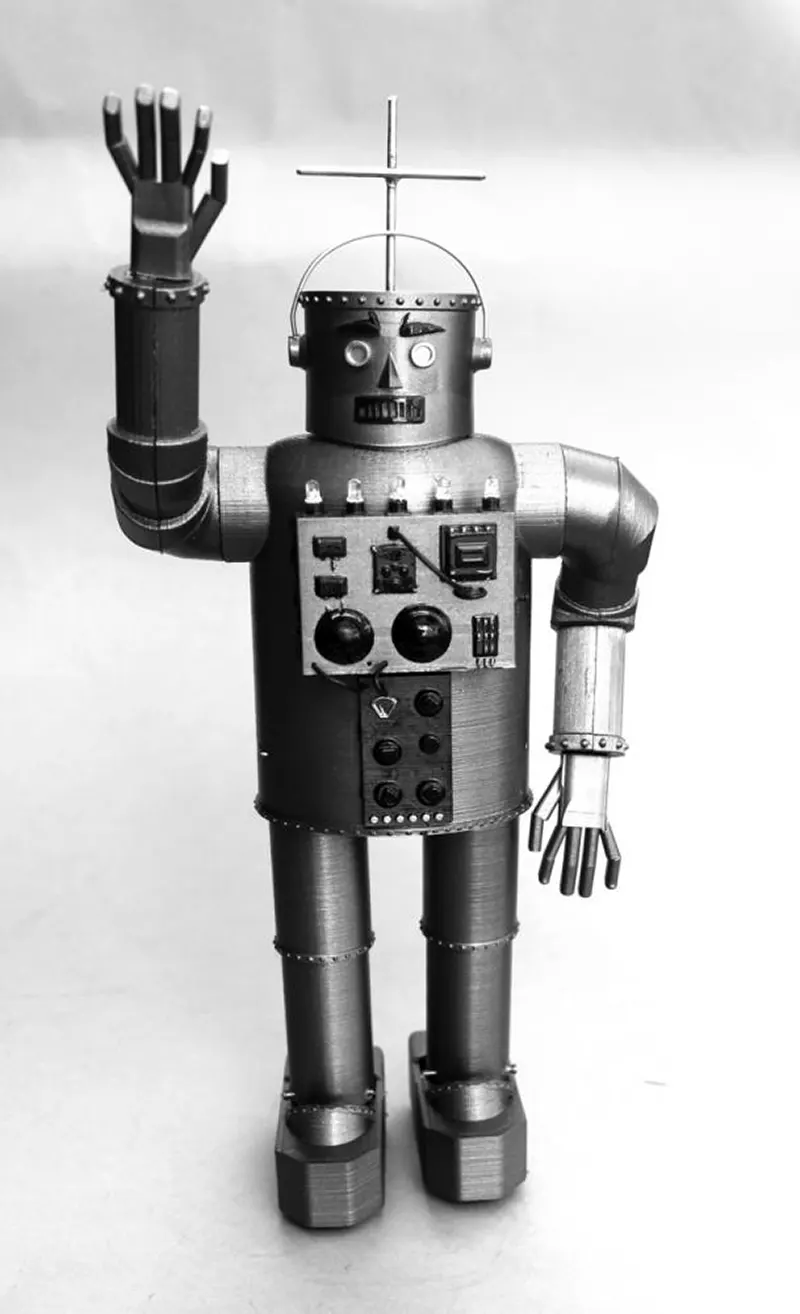
Когда мы внимательно рассматриваем робота Мицуи, то видим, что он почти не может двигаться. На его ногах нет колес, а форма ног предполагает, что он не может ходить. На верхней части ног имеются отметины, намекающие на возможный поклон, что имеет важный смысл для японской культуры.
Пальцы и шея не сгибаются, а руки могут двигаться только вверх в плече и вращаться в локте. Мы также видим шнур питания, идущий вверх по левой ноге.
Робот Эль-Чиспас, Испания (1953 г.) 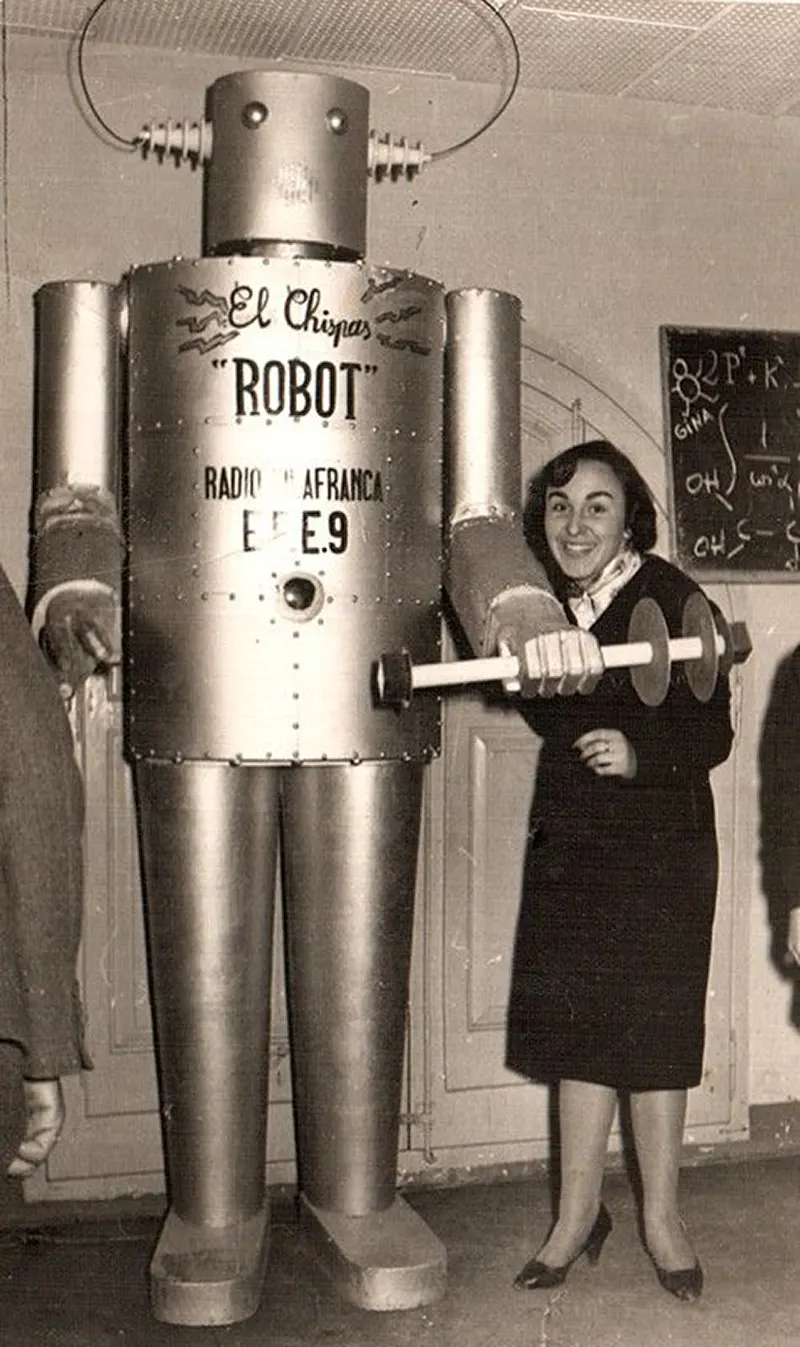
Рассказывает Антонио Гуаль из Барселоны: «В 1950-е годы мой отец, Антони Гуаль Сегура, и его коллеги на местной радиостанции Radio Vilafranca предприняли совместные усилия по проектированию и созданию замечательного творения, известного как «Эль Чиспас» (переводится как «Искры»). Это гениальное творение могло похвастаться способностью двигать руками и говорить, а в где-то в районе пупка у него имелось окошко, через которое можно было полюбоваться на очаровательные искры. Представление «Эль Чиспаса» во время праздничной Фиесты Майора в 1953 году вызвало настоящую сенсацию, оставив неизгладимое впечатление на присутствующих».
Робот-супермен Деннис (1939 г.) 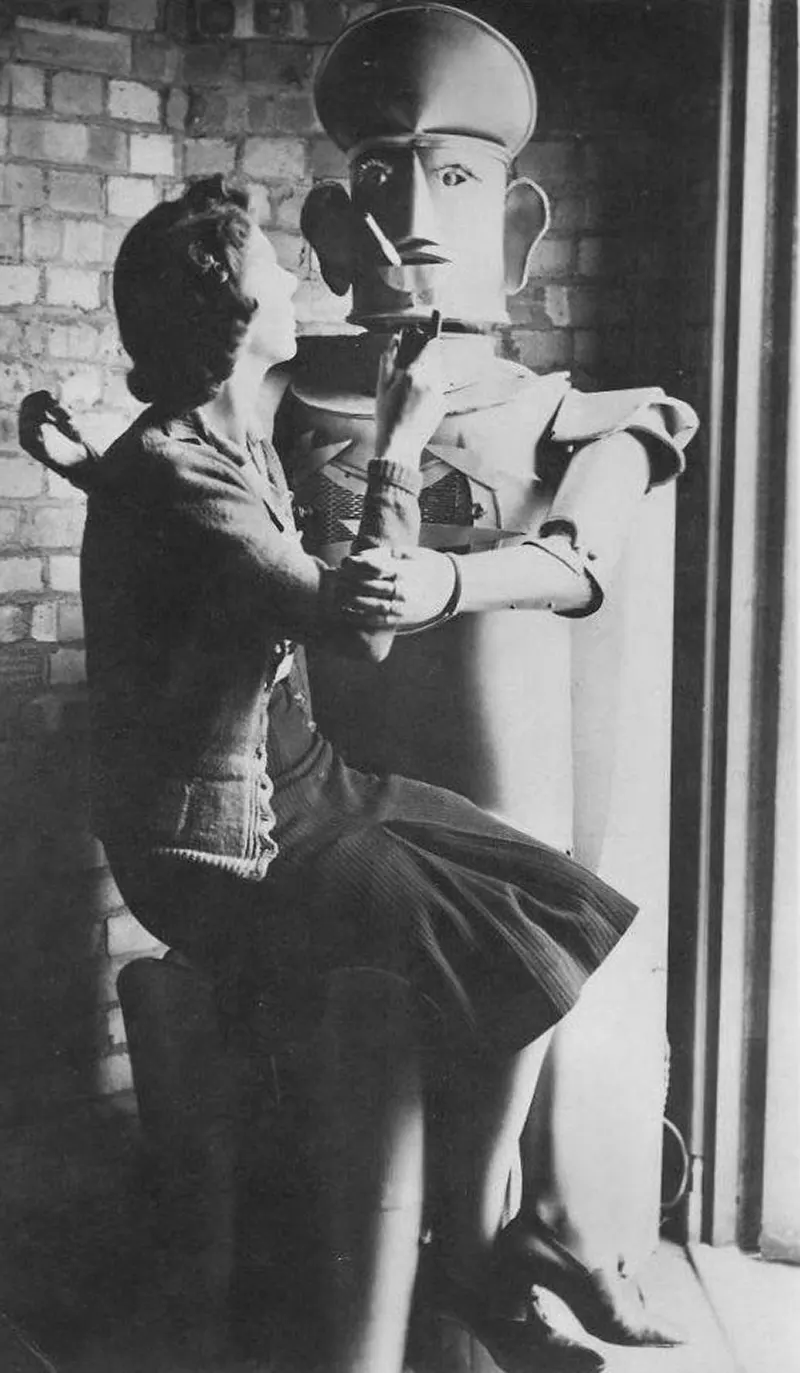
В 1939 году британский изобретатель Чарльз Лоусон создал «Супермена Денниса», робота высотой 2 метра. Утверждалось, что этот робот может делать множество различных вещей, например, контролировать движение транспорта, петь, прикуривать сигарету и курить её, а также сидеть или стоять. Простенько, но со вкусом! Робот Деннис подчеркнул творческий дух своего времени, показав, как машины могут имитировать действия человека и способствовать решению различных задач.
Мобот (1961 г.) 
На дворе 1961 год, и компания Hughes Aircraft Electronic Labs решила произвести революцию в мире с помощью великолепного робота-помощника Mobot.
Мобот был немного крупнее, чем несколько холодильников вместе взятых, и это механическое чудо должно было автоматизировать каждую критически важную задачу в вашей жизни. Он должен был помочь, например, накрасить ногти, застегнуть молнию на платье или причесаться. 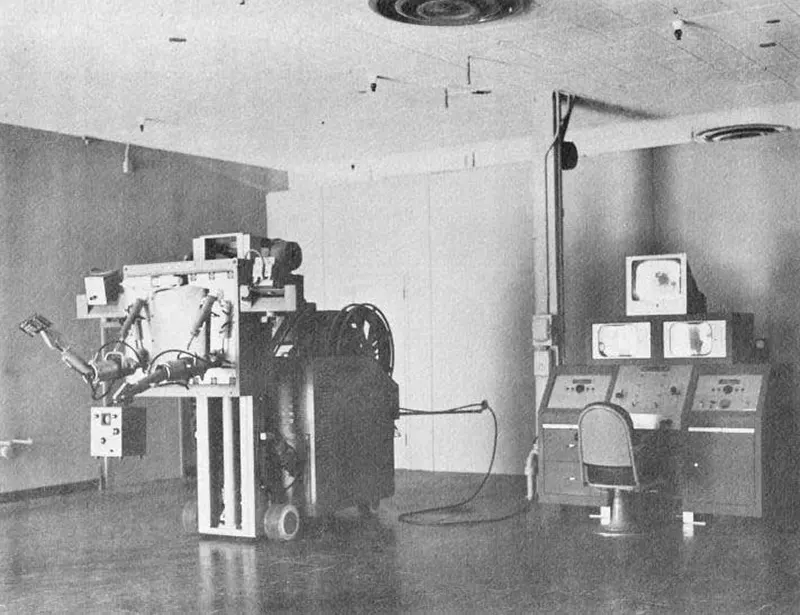
Целью проекта была разработка мобильного робота, который мог бы перемещаться и выполнять задачи автономно. Мобот был создан, чтобы продемонстрировать потенциал робототехники в различных приложениях, таких как наблюдение, исследование и, возможно, даже выполнение задач в опасных средах.
Проект, вероятно, включал в себя использование датчиков, вычислительных систем и алгоритмов, позволяющих роботу чувствовать окружающую среду, принимать решения и перемещаться без прямого контроля человека.
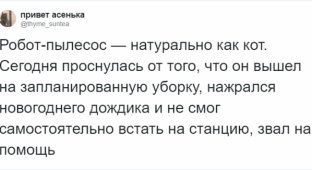
Робот-испытатель космического скафандра НАСА (1965 г.) 
Перед тем как отправить людей на Луну, НАСА хотело протестировать прототипы скафандров астронавтов на человекоподобном роботе. И такой андроид с гидравлическим приводом был создан... и даже мог быть нормально функционировать, если бы не его склонность к утечке масла при использовании. Так называемый проект «Сочлененный манекен с электроприводом» длился с 22 мая 1963 года по 31 июля 1965 года. 
Это разработка Исследовательского института IIT в Чикаго. Робот мог моделировать 35 основных движений человека и был оснащен датчиками на каждом суставе для измерения сил, воздействующих на человеческое тело со стороны герметичного скафандра. Движения робота-манекена обеспечивались гидравлическими приводами, приводившимися в действие маслом, которое текло через «систему кровообращения» из нейлоновых трубок.
Конструкция позволяла андроиду поворачивать бедра, поднимать и опускать руки и ноги, пожимать плечами, сжимать кулаки и даже пожимать руки, но он не мог выдерживать давление, необходимое для перемещения конечностей робота без утечек.
Сепулька, робот-экскурсовод, Советский Союз (1962 г.) 
Этот роботизированный гид был разработан в 1962 году в экспериментальной мастерской Всесоюзного общества «Знание» конструктором М. Александровым и художественным руководителем М. Гороховым, а затем отремонтирован в 1987 году. Использовался в Политехническом музее.
Речь Сепульки воспроизводится встроенным магнитофоном. Проигрывание ленты движений робота осуществляется дистанционно по радиоуправлению с расстояния до 20 метров.
Сепульку назвали в честь робота из рассказов Станислава Лема. Персонаж Станислава Лема Сепулька был объектом неизвестного происхождения и назначения.
Фредди Форд, механический робот, который отвечает на вопросы (1960-е гг.) 
Сделанный почти полностью из автомобильных деталей, Фредди имел рост 2,8 метра и весил более 360 кг. Вместо ног у него были масляные поддоны, вместо рук — тормозные колодки. Его уши были сделаны из крышек радиаторов с прикрепленными к ним автомобильными антеннами. Его глаза были габаритными огнями «Форда Мустанга», а рот — фонарем заднего хода «Форда Тандерберд». Его руки были выхлопными трубами, а ноги — амортизаторами.
С 1967 года Фредди помогал компании «Форд» продавать автомобили на автомобильных выставках. Он был не очень активен, но мог ответить на десяток вопросов «из зала» от посетителей. Неудивительно, что большинство его ответов содержали банальные шутки и восторженно отзывались о продукции Ford.
Робот Космос, Франция (1958 г.) 
«Подвинься, человек». Даже самому опытному парижскому водителю будет сложно устоять перед указаниями водителя этого своеобразного автомобиля.
Но никакого внеземного влияния здесь нет; это робот, рожденный и выросший прямо здесь, на Земле. Встречайте «Космос», доморощенное творение, которое стояло рядом с вертолетом на научной выставке на берегу Сены. Несмотря на беззаботную репутацию французов, «Космосу» удалось привлечь к себе значительное внимание.
Робо-Сенсор, Япония (1982 г.) 
Рассказ об этом чуде техники в журнале Weekly Reader, выпуск 23, 2 апреля 1982 г. «Японский робот пожимает человеку руку, в то время как специальные датчики в роботе измеряют хватку и температуру тела. Отображаются цифры, и робот может комментировать что-то вроде: «ВАУ, какая хватка!» Робот также может измерять комнатную температуру и утечки газа».
Робот Горо, Япония (1964 г.) 
На фотографии мы видим Горо, робота высотой полтора метра, разработанного исследовательской фирмой по производству игрушек. Он окружен школьниками в столице Японии Токио, 29 февраля 1964 года. Горо умеет ходить во всех направлениях, кланяется людям, которых встречает, подмигивает девушкам и разговаривает по радио в руке своего создателя.
Cygan (он же Gygan), Италия (1957 г.) 
Cygan, гигантский радиоуправляемый робот, который более полувека назад очаровал мир, сверкая глазами, похожими на автомобильные фары, резко поворачивая голову слева направо и двигаясь вперед с ужасающей скоростью, был продан на аукционе после того, как десятилетиями хранился в частной коллекции.
Машина высотой 2,5 метра и весом 450 кг была показана на торговой ярмарке в Милане в 1957 году, тогда же, когда в космос запустили первый искусственный спутник Земли «Спутник-1». 
Дизайнер Пьеро Фиорито, инженер из Турина, уверенно утверждал, что его робот выглядит как «гордый англичанин».
Робот Барбаросса (1909 г.) 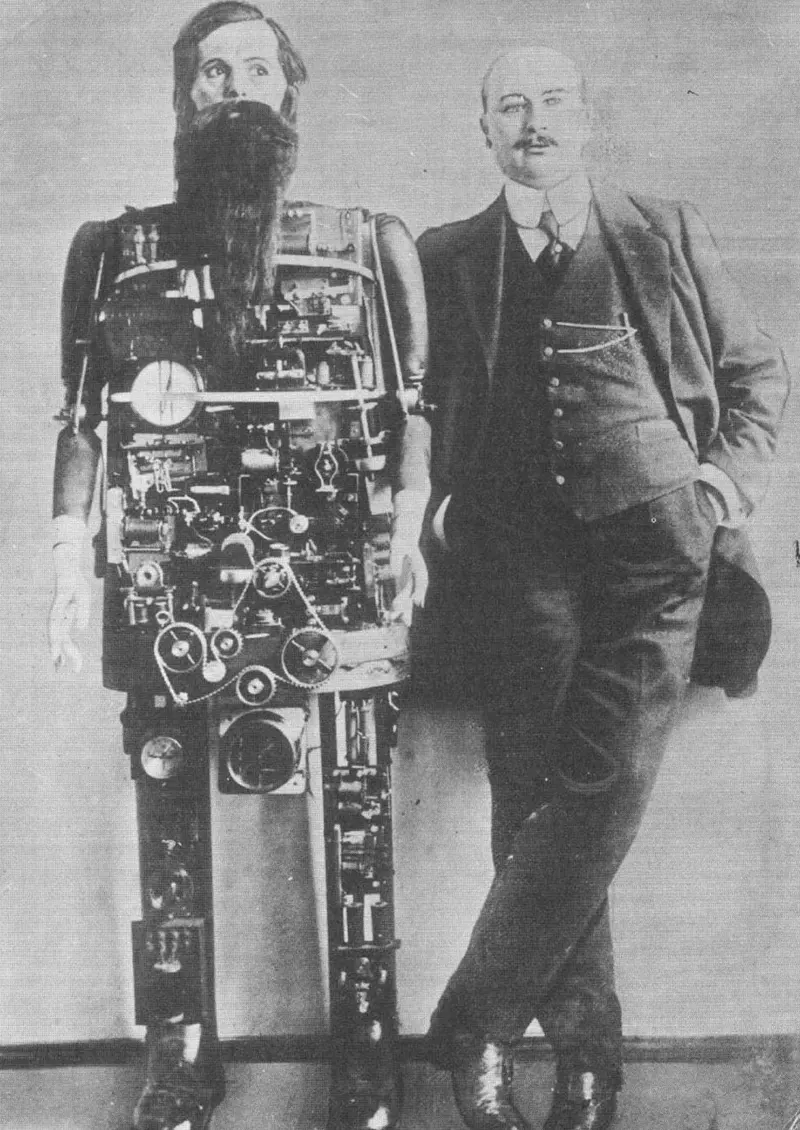
Известно об этой истории очень мало. Есть лишь странная фотография и статья, в которой рассказывается о роботе по имени Оккультус или Барбаросса, выставленном в Берлине в 1909 году герром Адольфом Уитменом, известным немецким изобретателем.
«Уитмену после долгих лет работы удалось создать механического человека, который может ходить, говорить, петь, свистеть и смеяться. Этот механический шедевр настолько человечен, что на расстоянии метра его невозможно отличить от живого существа. Фигура представляет собой массу замысловатых шестеренок и механизмов. В сундуке расположено несколько фонографов, но как управляется механизм, остается тайной изобретателя. Говорят, что в основе механического чуда лежат беспроводные электрические волны. Каждая часть фигуры управляется небольшим электродвигателем».
Робот Unimate (1961 г.) 
Робот Unimate подаёт кофе, 1967 год
Unimate был первым промышленным роботом, который работал на сборочной линии General Motors на заводе Inland Fisher Guide в Юинг-Тауншип, штат Нью-Джерси, в 1961 году.
Он был изобретен Джорджем Деволом в 1950-х годах на основе его оригинального патента, поданного в 1954 году и выданного в 1961 году. Машина выполняла работу по транспортировке отлитых под давлением деталей со сборочной линии и сварке этих деталей на кузовах автомобилей. Это было опасной задачей для рабочих — они могли отравиться ядовитыми парами или травмироваться по неосторожности.
Эрик, британский робот (1928 г.) 
Эрик Робот и его изобретатель капитан У.Х. Ричардс.
Даже британские роботы устраивают послеобеденное чаепитие. Эрик, первый когда-либо существовавший британский робот, казалось, верил, что ему есть чему подавать пример. Он умел поворачивать голову и кланяться. Его изобретателя звали У.Х. Ричардс.
Робот Арок (1970-е) 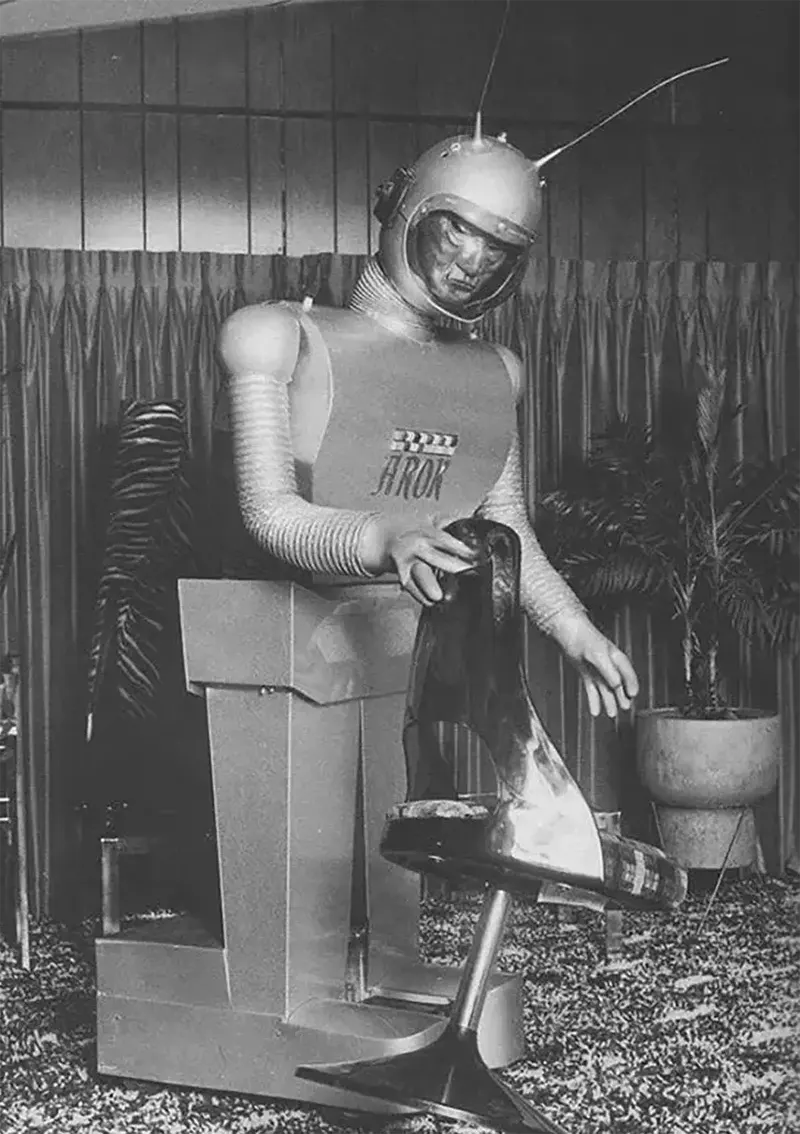
Разработка Бена Скоры из Палос-Хиллз. Робот АРОК (фамилия Скоры, написанное задом наперед, без буквы S), в рабочем состоянии мог выполнять различные задачи, такие как уборка пылесосом, смешивание напитков, разговоры, фотографирование, подъем тяжестей до 70 кг и выгуливание собаки. Он также мог сгибаться в талии под углом 45 градусов и поворачивать верхнюю часть туловища вправо и влево. Он также мог «ехать» со скоростью 5 км в час. 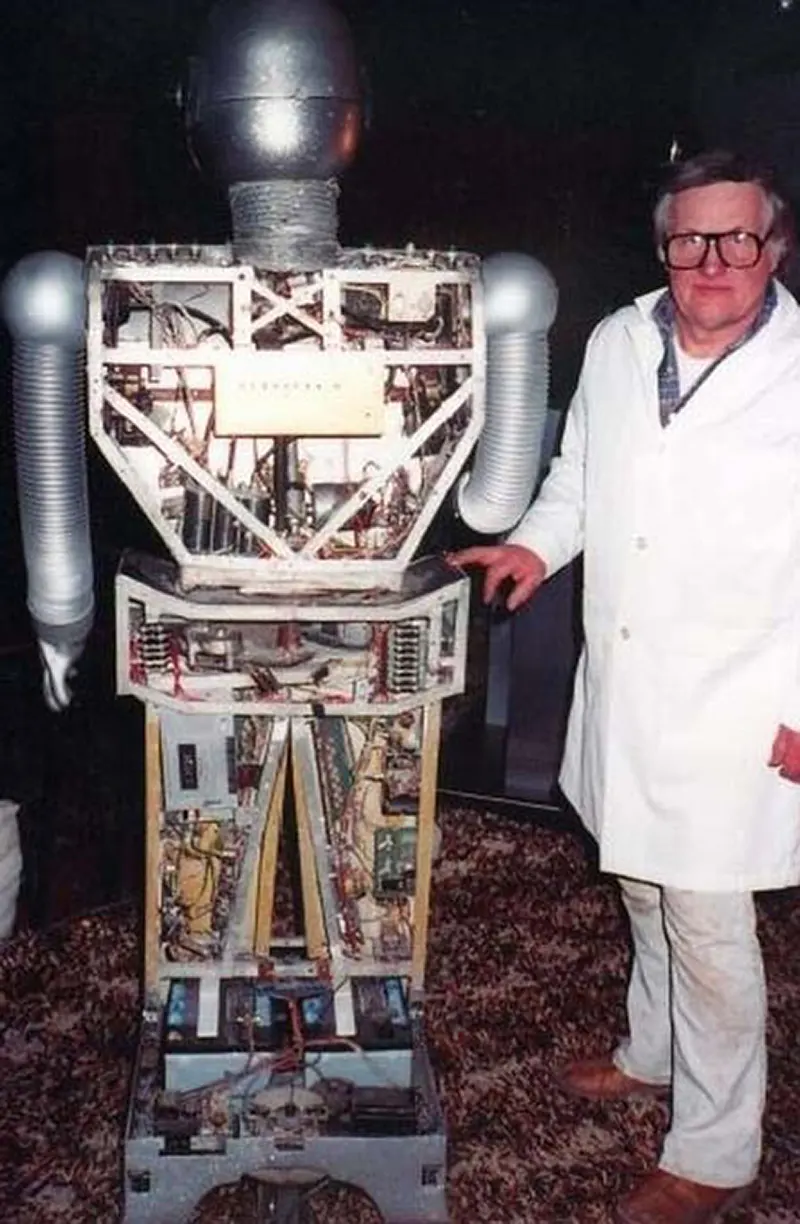
Бен Скора с 1969 по 1975 год создавал AROK, используя обычные, повседневные детали. Внутри алюминиевого корпуса робот имеет две автомобильные батареи напряжением 12 В, 15 электронных двигателей, 35 реле и сотни полупроводниковых интегральных схем.
Вместо черепа у него мотоциклетный шлем, вместо рук — вытяжной шланг от сушилки для белья, а вместо рук — резиновые перчатки. В его панели управления есть микрофон, а в голове — динамик. 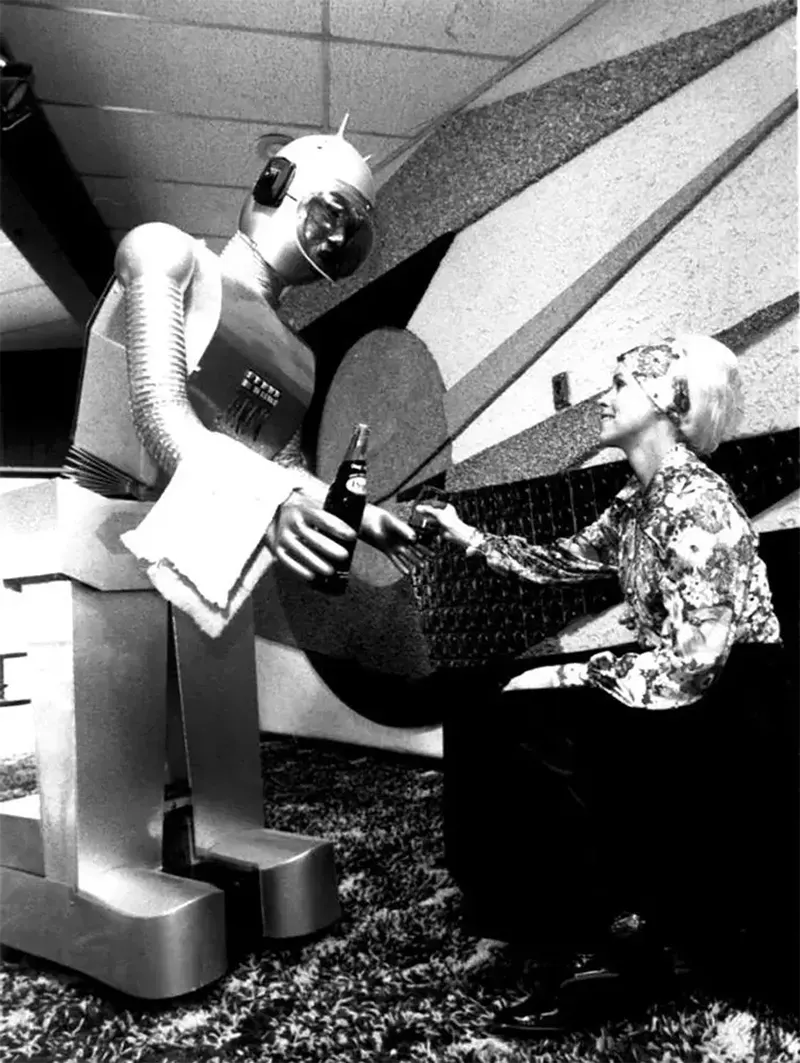
Управлять им можно с помощью пульта от телевизора, используя сигналы FM-радио. Один из двух 12-вольтовых автомобильных аккумуляторов обеспечивает питание AROK, а другой — привод двигателей.
Аккумуляторы размещены на платформах в ногах, а приводной механизм – в основании.
Робот Леонардо (1492 г.) 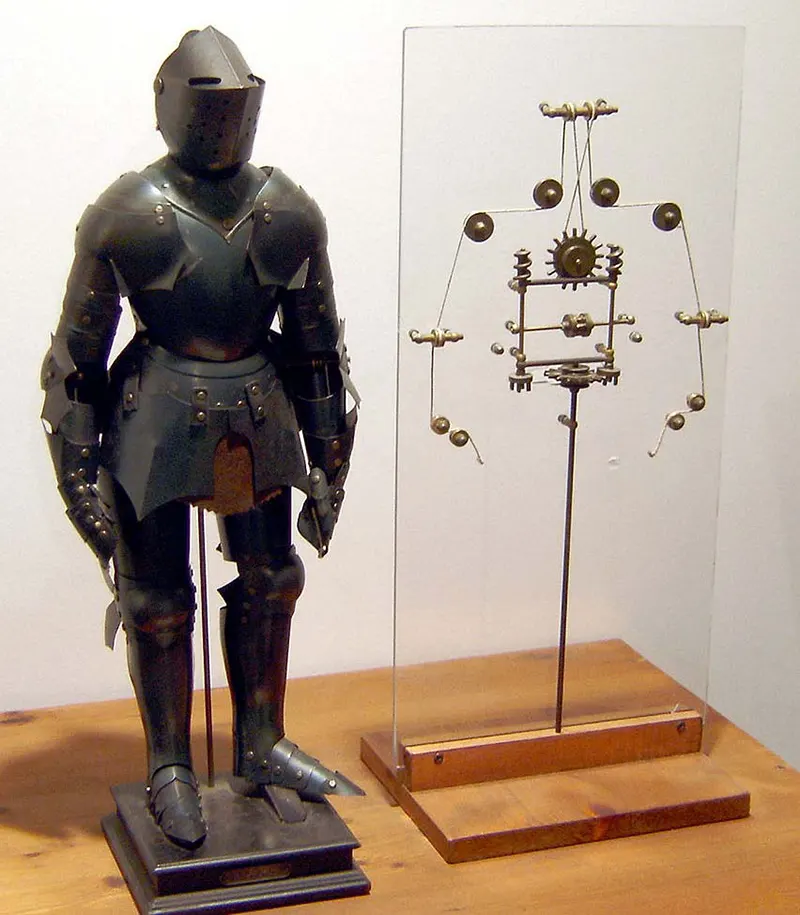
Модель робота Леонардо с внутренним устройством. Вероятно, придуман Леонардо да Винчи примерно в 1495 году.
Заметки о проекте робота найдены в альбомах Леонардо да Винчи для рисования, которые были заново открыты в 1950-х годах. Говорят, что Леонардо продемонстрировал машину на празднике, устроенном Людовико Сфорца при миланском дворе в 1495 году.
Робот-рыцарь мог стоять, сидеть, поднимать забрало и самостоятельно маневрировать руками, а также имел анатомически правильную челюсть. Вся роботизированная система управлялась рядом шкивов и тросов. После обнаружения эскизов робот был построен точно по проекту Леонардо и оказался полностью функциональным.
Робот Мария из фильма «Метрополис» (1927 г.) 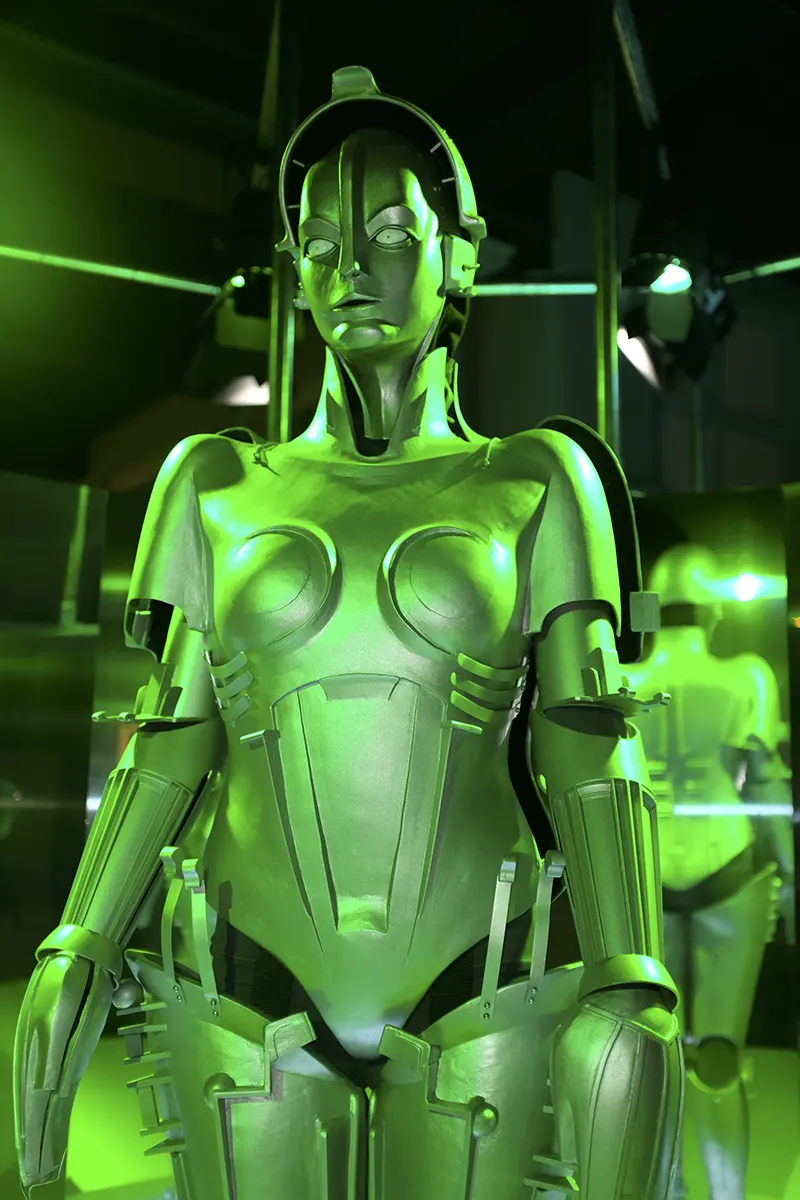
«Метрополис», немой научно-фантастический фильм, выпущенный в 1927 году режиссером Фрицем Лангом, познакомил зрителей со знаковым персонажем, человекоподобным роботом по имени Мария.
Внешность Марии в «Метрополисе» действительно опередила свое время. Она была технологическим чудом, сочетающим творческий дизайн с ранними методами создания спецэффектов. Роль Марии в фильме заключалась в том, чтобы служить инструментом манипуляции и контроля. Ее использовали для манипулирования рабочими городского метрополитена и поддержания статус-кво.